3.11 Elementos de una
órbita
Sabemos que para determinar completamente la
solución del problema de los dos cuerpos necesitamos seis constantes de
integración y, además, un dato: la masa del secundario que nos permite conocer m. Por tanto, para definir la posición
de un astro en una cierta época, en general, es necesario conocer siete
cantidades denominadas elementos de la
órbita, si bien en algunos casos particulares son suficientes seis
elementos (caso de los satélites artificiales y de los pequeños planetas, en
que su masa es despreciable frente a la del primario), o, aún, cinco elementos
(caso de los cometas de órbita parabólica, en que además, e=1). Dichos elementos orbitales no tienen porque coincidir con las
constantes de integración originales c,
e, T, puesto que pueden sustituirse por un mismo número de expresiones
independientes entre sí que involucren a dichas constantes.
La posición de la órbita con respecto a un
triedro fundamental de referencia X, Y, Z,
queda determinada por medio de tres de dichos elementos, los ángulos de Euler W, i, w (Fig.10.3). La
intersección del plano de la órbita con el plano fundamental de referencia X, Y
recibe el nombre de línea de los nodos. Hay
un nodo ascendente, N, extremo en el que el astro pasa de la
región de las Z negativas a la de las
Z positivas, y otro diametralmente
opuesto o nodo descendente.
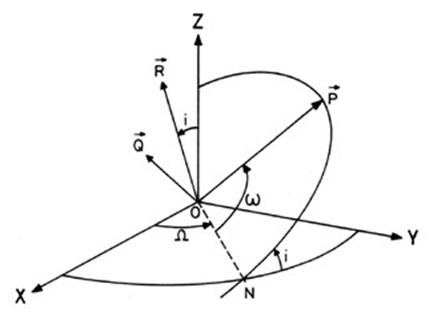
FIG 10.3
W es el argumento del nodo o ángulo formado por el eje X y la dirección del nodo ascendente.
i es la inclinación de la órbita, o ángulo
formado por los planos de la órbita y fundamental.
Si 0º £i<90° el
movimiento se llama directo, y si 90°
£i< 180° retrógrado.
w es el argumento del periastro ángulo que forman la línea de los nodos y
la dirección del periastro, contado en
el sentido del movimiento a partir del nodo ascendente: 0º £.w£ 360º.
Cabe destacar dos casos particulares
importantes:
a) Si el primario es el Sol y el secundario
un planeta o un cometa, el plano fundamental es el plano de la eclíptica media
y la dirección del eje X la dirección
del Aries medio, W se denomina longitud del nodo ascendente y w argumento
de latitud del perihelio.
b) Si el primario es un planeta y el
secundario un satélite, natural o artificial, del mismo, el plano fundamental
es el plano del ecuador del planeta y el eje X viene definido por la intersección del plano orbital del planeta
en su traslación alrededor del Sol con el plano del ecuador. En el caso de la
Tierra, la dirección del eje X
coincide con la dirección de Aries. W se
denomina ascensión recta del nodo
ascendente y w argumento
de declinación del perigeo.
Algunas veces se trabaja con el ángulo
![]()
llamado longitud del periastro;
se cuenta primero sobre el plano fundamental (eclíptica o ecuador) y después
sobre el plano de la órbita en la dirección del periastro.
3.11.2 Los restantes elementos
Los tres elementos que acabamos de estudiar
determinan la orientación del plano de la órbita. Son necesarios, en general,
otros dos elementos para determinar la magnitud y forma de la órbita. Suelen
ser el semieje mayor a y la excentricidad e. En
algunos casos estos dos elementos se sustituyen por la distancia del periastro: ![]() y la distancia del apoastro:
y la distancia del apoastro:![]() .
.
Si se trata de una órbita parabólica basta
con un solo elemento, la distancia del periastro q = p/2.
Finalmente, para definir la posición del
astro en una determinada época, aún son necesarios otros dos elementos: el periodo de revolución, P, o el movimiento medio n=2p/P y la época de paso por el periastro, T,
o la anomalía media, MO, en una época tO.
P es
necesario si no se conoce m; en
caso contrario, la tercera ley de Kepler nos suministra fácilmente el valor de n y, por tanto, de P. Tal es el caso de un satélite artificial o de un pequeño
planeta.
3.11.3 Constantes vectoriales ![]() ,
,![]() ,
,![]()
Los tres ángulos de Euler se sustituyen
frecuentemente por tres constantes
vectoriales, ![]() ,
,![]() ,
,![]() , tres vectores unitarios ligados a la órbita y
definidos como sigue:
, tres vectores unitarios ligados a la órbita y
definidos como sigue:
![]() perpendicular al plano de la órbita.
perpendicular al plano de la órbita.
![]() en el plano de la órbita y en el sentido del periastro.
en el plano de la órbita y en el sentido del periastro.
![]() en el plano de la órbita y perpendicular a
en el plano de la órbita y perpendicular a ![]() , de modo que:
, de modo que: ![]()
Los vectores así definidos (Fig.
10.3) son ortogonales dos a dos (![]() ) y como además son unitarios (P2=Q2=R2=1), de las nueve
constantes escalares que originan sólo tres son independientes, como era de
esperar.
) y como además son unitarios (P2=Q2=R2=1), de las nueve
constantes escalares que originan sólo tres son independientes, como era de
esperar.
Consideremos un sistema de coordenadas
rectangulares cuyos ejes coincidan con las direcciones de los vectores ![]() ,
,![]() ,
,![]() , ejes que designaremos con estos mismos nombres, y
veamos cual es la matriz de cambio de base para pasar del sistema P,Q,R, al sistema X,Y,Z. Efectuaremos en primer lugar un giro de ángulo (-w) alrededor del eje R que vendrá definido por la matriz
, ejes que designaremos con estos mismos nombres, y
veamos cual es la matriz de cambio de base para pasar del sistema P,Q,R, al sistema X,Y,Z. Efectuaremos en primer lugar un giro de ángulo (-w) alrededor del eje R que vendrá definido por la matriz
Con ello el eje P pasa a ocupar la posición de la línea de los nodos, el eje Q sigue en el plano de la órbita
perpendicular a P y el eje R queda en la misma posición. A
continuación efectuaremos un giro de ángulo (-i) alrededor de la línea de los nodos, giro que vendrá definido por
la matriz
Con ello abatimos el plano de la órbita sobre
el plano fundamental X, Y. El eje P queda sobre la línea de los nodos y el Q, perpendicular a ella sobre el plano fundamental; el eje R toma la posición del Z. Finalmente, giraremos alrededor de Z=R
un ángulo (-W), siendo la matriz correspondiente
con lo cual llevamos a coincidir P
con X y Q con Y.
Efectuando el producto de las tres matrices
tendremos la matriz de cambio de base buscada:
y observando, que si aplicamos esta matriz M al vector ![]()
obtenemos dicho vector en la base X,Y,Z, y análogamente aplicándola a ![]() y
y ![]() , podremos escribir:
, podremos escribir:

Es decir:
de donde, identificando con el resultado obtenido de (68.3)
obtenemos:
 (70.3)
(70.3)
En virtud de la forma (69.3)
que presenta la matriz M y las
propiedades mencionadas de los vectores ![]() ,
,![]() ,
,![]() , resulta que M
es ortogonal. Además, por ser los triedros P,Q,R
y X,Y,Z de igual orientación el
determinante de M es |M|=1. Observamos también que las
constantes
, resulta que M
es ortogonal. Además, por ser los triedros P,Q,R
y X,Y,Z de igual orientación el
determinante de M es |M|=1. Observamos también que las
constantes ![]() ,
,![]() ,
,![]() dependen únicamente de los ángulos de Euler.
dependen únicamente de los ángulos de Euler.
Los elementos ![]() ,
,![]() ,
,![]() , a, e pueden ser sustituidos también por c y e.
En efecto, sabemos que p = c2/m, y en el caso de una elipse p= b2/a =a(1-e2), por lo que:
, a, e pueden ser sustituidos también por c y e.
En efecto, sabemos que p = c2/m, y en el caso de una elipse p= b2/a =a(1-e2), por lo que:
 (71.3)
(71.3)
y, por otra parte, al ser unitarios los vectores ![]() ,
,![]() ,
,![]() ,
,
lo cual nos dice que los ángulos de Euler están relacionados con ![]() y
y ![]() y, en consecuencia,
podemos determinar completamente la trayectoria del secundario con cualquiera
de los sistemas de siete constantes mencionados.
y, en consecuencia,
podemos determinar completamente la trayectoria del secundario con cualquiera
de los sistemas de siete constantes mencionados.
3.11.4 Determinación de los elementos orbitales a partir de ![]() y
y ![]()
Un importante proceso en el problema de la
determinación de órbitas es el cálculo de los elementos cuando se conocen la
posición y la velocidad en el mismo instante. Supongamos, en efecto, que se
conocen ![]() ,
, ![]() y
y ![]() en un cierto
instante to. En el
problema de los dos cuerpos la integral de las áreas nos da
en un cierto
instante to. En el
problema de los dos cuerpos la integral de las áreas nos da
![]()
pudiéndose expresar esta relación, según la segunda de (72.3), teniendo en cuenta las componentes de ![]() , en función de W e i (incógnitas).
, en función de W e i (incógnitas).
Por otra parte, en el mismo problema, se
obtiene
![]()
y teniendo en cuenta la primera de (72.3) y las
componentes de ![]() podemos
expresar en función de W, i,
w.
podemos
expresar en función de W, i,
w.
Si suponemos el movimiento elíptico, tenemos
de donde:
![]()
De la relación
![]()
una vez determinada a
deducimos n:
![]()
Todavía de la expresión (38.3) que nos da el radio vector en función de a, e
y E podemos deducir Eo:
![]()
y llevando el valor de e y de
Eo a la ecuación de Kepler
(44.3), obtenemos el valor de Mo:
Mo= Eo -e sen Eo
que con n y to nos permite determinar la
época T de paso por el periastro a
partir de la relación
![]()
Es decir:
![]()
Si el movimiento es parabólico, ![]() se halla
análogamente y la fórmula p=c2/m nos da, p=2q.
se halla
análogamente y la fórmula p=c2/m nos da, p=2q.
De
![]()
obtenemos
![]()
valor que llevado a (62.3) nos dará:
![]()
que nos permitirá hallar T.
Si el movimiento es hiperbólico se aplica
![]()
fórmula de la cual deducimos el valor de F que se sustituye en la
ecuación
![]()
de la que se obtiene T.